第06天 10/17 拉薩 > 青藏鐵路 > 西寧
在旅館用過豐盛的早餐後,就搭車前往拉薩車站。進車站時也是3道關卡,由於明天是10/18是19大召開日期。安檢更是嚴格,感覺像是被扒了層皮似的通過安檢。同行的朋友抱怨,每天剛買的打火機通過安檢時都被收走。大家相視而笑,沖淡的不少緊張的氣氛。
【青藏鐵路】從西藏搭乘青藏專列前往西寧這一段全長 1956Km預計要搭乘22個小時,沿途會經過三個世界之最,1.世界最長的高原凍土隧道:崑崙山隧道 1686m。2.世界最長的鐵路大橋:清水河特大橋 11.7Km。3.世界海拔最高的火車站:唐古喇火車站 5072m。大夥都是第一次搭上青藏鐵路,興奮的心情寫在臉上。車上的設施都饒有興趣的研究了 一遍,才乖乖的坐回包廂中。
 |
| 從西藏搭乘青藏專列前往西寧 |
一進車廂,費了九牛二虎之力,將行李放置於床位的下方。領隊介紹車廂內設施,全封閉式的車廂採用彌散式供氧與分布吸氧方式。而面對青藏高原風沙大、紫外線強的自然環境,列車車窗的防壓差雙層玻璃都裝有防紫外線貼膜,所以不用帶太陽眼鏡啦。軟臥是4人一室,有滑門可關上,隔音效果不錯。每節車廂配有一位服務員,如有問題可隨時與乘務員提出要求(雖然不一定會理你)。
 |
| 青藏鐵路軟臥 |
每個床位都有氧氣接孔和閱讀燈可用,LCD電視試過後發現沒啥用,就放棄了。
 |
| 氧氣接孔和閱讀燈 |
由於車內空間有限,洗潄間的空間是共用。每一節軟臥有8間房,一間房四個人所以每一節軟臥32人。所以一早大家都會在此排隊刷牙洗臉。有淋浴間嗎?答案是沒有。
 |
| 軟臥區的洗潄間 |
另外還有硬舖,有幾位團員因旅行社告知票務發生中途攔截的問題,只能安排在硬舖區。好奇心驅使下也跟著過去看看。硬臥6人一室,房間沒有拉門,比較沒有隱私可言。床位大小與軟臥差不多。但是每節10間房,所以每節車廂全坐滿是60人。
 |
| 青藏鐵路硬臥 |
 |
| 硬臥區的洗潄間 |
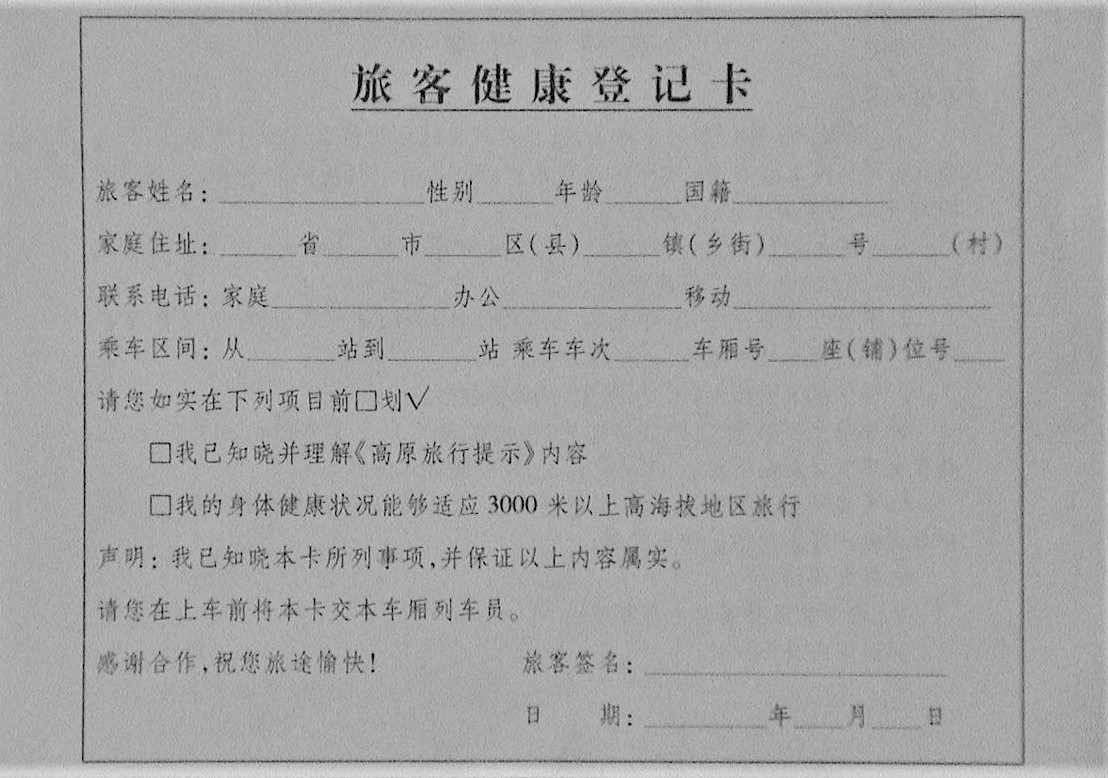
上車後須填寫「旅客健康登記卡」,經過列車長的暗示,國籍處寫上China Taiwan,應付了事。列車長會將上車的乘客的證件收走,提供車上的臨時證件。這樣確保乘客不會中途"莫名的消失"?

車內分為四區由前至後分別是,軟臥區
、餐車、硬座區、硬臥區。各區間都門禁區隔,中午我們從硬臥區要走去餐車用餐,需要請列車長帶鑰匙來開門才能穿過硬座區到餐車。但由於車內全程封閉供氧,旅客不可能打開車窗。走過硬座區菸臭與體味散溢又悶,只能快步向前。晚餐時聽聞他們三位再次穿越硬座區來到餐車。只說了一句,那味道濃度比上午強上三、四倍不止,我聽了不寒而慄。
 |
| 硬座區空間 |
多數時間眼光都被車窗外美麗的景色吸引了,不時乘務員會透過廣播告訴旅客目前的地理位置。隨行的有位老大哥,對西藏地形很熟。隨著列車的行進,將附近經過的地名娓娓道來如數家珍。幾位隨行的友人,因故改去6人一房的硬舖,跟過去看看。經過普通車廂,由於全車空調密閉那車廂中的氣味真是有種說不出的感覺。帶著五味雜陳的心情到了硬舖區,由於該區上車人少,只有我們4人在一車廂中,空氣格外清新。大夥兒愉快地聊天,分享旅程中的所見所聞。我們搭乘的列車9:00自拉薩發車,海拔 3641 公尺。
 |
| 出拉薩站後車外風光 |
青藏鐵路起於青海省省會西寧,向西經湟源、海晏,沿青海湖北緣繞行,經德令哈至錫鐵山,南折與315國道並行後到達柴達木盆地中的格爾木。由格爾木南行起攀上崑崙山,穿越可可西里,經過風火山、唐古拉山,進入西藏的安多、那曲、當雄,最後終到西藏自治區首府拉薩。
青藏鐵路路線圖
沿鐵路設有崗哨,約略每公里有一步兵哨,每五公里有一崗哨,火車經過有時會有解放軍出來行禮。
 |
| 沿線的步兵哨 |
10:00 羊八井站,72 公里,聽說這裡有溫泉。這段路程車速有些緩慢,猜測是在上坡路段。
 |
| 羊八井站 |
11:30 當雄,164公里,海拔 4293 公尺,藏語意為“被挑選出來的好地方”,是西藏水草最為豐美的地段。傳說1000多年前,文成公主遠嫁吐蕃王松贊幹布,途經藏北時,曾駐紮在當雄草原,看著美麗的景色,高興地說“這真是上天選出來的好地方”,當雄便由此得名。-
資料來源維基百科
 |
| 當雄車站 |
13:10 那曲,322 公里,海拔 4513 公尺,是藏文的譯音,意為黑色的河流,因怒江上游那曲河流經境內而得名,是藏北最大城市。這裡可以下車拍照,但只停留6分鐘,一下子就被趕上車。
 |
| 那曲站 |
13:30 措那湖,404公里,海拔4650米,三大聖湖之首,是怒江的源頭湖,世界海拔最高的淡水湖,青藏鐵路沿線最著名的景點之一。措那湖很大,列車開了20多分鐘,它才遠離了我們的視線。
 |
| 措那湖 |
火車行駛經過措那湖,停在措那湖站沒2分鐘就繼續向前行駛。很可惜沒機會下車走走。
 |
| 措那湖站 |
14:00 安多,436公里,海拔4702米,安多站站房設計模仿帳篷及氈房,屋頂的挑檐以對稱的兩翼上揚設計,仿如草原上隨處可見的雄鷹,也隱喻安多以至西藏的飛升之勢。-
資料來源維基百科
 |
| 安多站 |
16:20 唐古拉火車站,536公里,海拔 5072 公尺,這裏既是青藏鐵路的最高點,也是世界鐵路的高海拔之最。回來後整理照片,很奇怪都沒有拍到這個車站的照片。只記得當時車掌有提試到了唐古喇山脈穿過隧道後,就有凍土積雪畫面很漂亮。不知道是否列車直接穿越該站?只好從網路找了一張了表心意。
 |
| 唐古拉火車站(圖片來自網路) |
布瑪德站位於中國青海省海西州格爾木市唐古拉山鄉。該站為青藏鐵路的無人駐守車站。當時列車也未停下我只是剛好順手一拍,留下倩影。
 |
| 布瑪德火車站 |
18:27 沱沱河,733 公里,海拔 4547 公尺,是長江源頭與青藏線的交匯點。它發源於唐古拉山脈主峰格拉丹冬西南側姜根迪如雪山的冰川,冰川海拔在 5500 公尺以上。在源頭附近的海拔 6000 公尺以上的雪峰共有二十餘座,雪線高達 5800 公尺。-
資料來源維基百科
 |
| 沱沱河站 |
 |
| 從青藏鐵路看沱沱河 |
過了沱沱河後,列車繼續往江克棟(海拔 4778 公尺)方向駛去,進入了一片白雪點綴的世界。隨著太陽西下,我們在餐車一邊說說笑笑,一邊觀賞車窗外的美景。悠閒地用過晚餐,直到夜幕低垂將車窗外的美景掩蓋了。
 |
| 列車進入凍土區的景色 |
 |
| 列車行駛至轉彎處 |
晚上約莫22:40左右,列車停了下來。原來是到了格爾木車站,領隊日間有提到這是個大站。列車會停得比較久約30分鐘。果然看到一群人開始上車,男女老少都有。隨後列車啟動,我又昏沉沉的睡了過去。
格爾木車站
6:51 西寧站 1956公里,海拔 2275公尺,經過22小時的車程,一覺好眠,終於抵達西寧。這時天還未亮,簡單洗潄後。收拾行李準備下車。在月台上,明顯的感受到涼意,趕緊拿出外套穿著。沒想到,這次帶的厚外套,在這裡派上用場。
當天導遊帶著我們去西寧東關清真寺參訪,是西寧市一座規模最大保存最為完整的古代建築是青海省目前最大的伊斯蘭教寺院,融合塔、牆、殿為一體的伊斯蘭建築.由於當天並非禮拜日,諾大的清真寺空蕩蕩的。裡面的建築融合各種文化風格,對比之下可以感受建築文化差異衝突的美感.用過午膳後下午搭機返回台灣,結束了這一連多日的旅程.感謝2位好友的陪伴順利的走完這段旅程,留下難忘的回憶.